
메사추세츠공대(MIT) 김상배 교수 연구팀이 보지 않고도 계단을 오르는 로봇개 ’치타 3’(Cheetah 3) 최신 버전을 공개했다.
유튜브를 통해 공개된 영상을 보면 치타 3는 카메라를 이용한 주변 환경의 시각 정보를 수집하지 않는 상황에서도 문제 없이 걷고 뛸 뿐 아니라 쓰레기로 어지러운 계단을 오를 뿐 아니라 흐트러진 자세도 빠르게 바로 잡는 모습을 보여준다.
메사추세츠공대가 낸 설명자료에 의하면, 무게 약 40㎏(90파운드)의 치타는 카메라나 다른 시각 센서 없이 모든 행동을 할 수 있도록 설계되었다. 말하자면 깜깜한 어둠 속을 움직이는 장님 강아지인 셈이다. 대신 촉각 센서로 주변을 “느끼고” 이를 공간 알고리즘으로 분석해 길을 개척한다.
김상배 교수는 “치타는 시각 정보에 의존하지 않고도 많은 예상치 못한 상황에 맞는 행동을 할 수 있다는 것을 보여주었다”며 “시각 정보는 오류가 많고 부정확하며, 종종 쓸 수 없는 경우가 있다”고 말했다. 이런 정보를 정확히 분석하려다 보면 로봇의 행동이 느려진다는 것이 김 교수의 판단이었다. 그는 “그래서 예상치 못한 장애물에도 빠르게 움직이는 로봇을 만드려면 촉각 정보에 더 의존해야 한다고 판단했다”고 말했다.
치타 3는 이밖에도 하드웨어 성능이 전 버전에 비해 여러 모로 향상되었다. 움직임의 범위가 넓어졌고, 제자리에서 로봇의 앞과 뒤를 바꿀 수 있으며, 고양이처럼 뛰어오르는 것도 가능해졌다.
치타 3는 인간이 접근하기 어려운 위험한 공간에서 탐색, 구조 등의 작업을 수행하기 위해 만들어졌다. 시각에 의존하지 않는 특징은 이런 환경에서 특히 강점이 될 수 있다. 기술매체 <더버지>(The Verge)에 의하면 후쿠시마 원전 사고 당시, 강한 방사선이 로봇의 카메라를 구워 버린 사례가 있기 때문이다.
'인터넷|IT' 카테고리의 다른 글
| Facebook에서 동영상으로 수익 창출하기 (0) | 2019.09.10 |
|---|---|
| 데이터 분석의 4가지 분류 (0) | 2019.07.12 |
| 삼성 TV 주변 모드(Ambient Mode) (0) | 2018.08.22 |
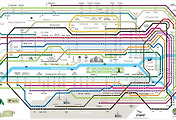
| SCM IT Subway Map (0) | 2018.07.26 |
| SMARTIBOTS GOOGLE CARDBOARD VR (0) | 2018.07.08 |
| 무료 스마트폰 미러링 ApowerMirror (0) | 2018.06.22 |
| 게임 '라스트 오브 어스 파트2' 게임 플레이 영상 (0) | 2018.06.13 |
| 4:33의 모바일 게임 배틀붐(Battle Boom) (0) | 2018.05.01 |




댓글